
|
England & Wales Lighthouse Compendium  |
Derelict Wartime RAF Base MU70 Woodcote  |
History of Mellanear Copper & Tin Mine  |
|
Rise and Fall of the Cornish Serpentine 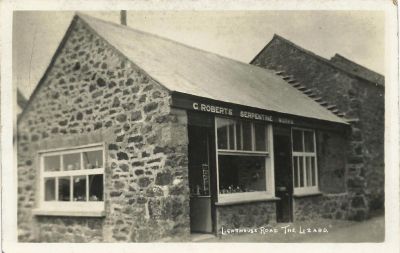 |
Cornish Stiles and Other Unusual Curiosities 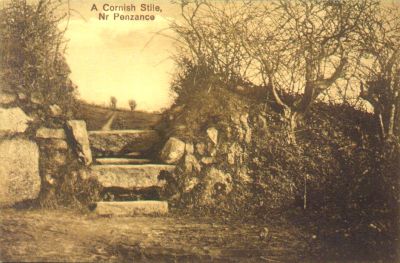 |
Prisoner of War Camp, St Erth, 1943  |
The 'Defence of Britain' was a voluntary national project based at the Imperial War Museum and was started in 1995. The aim was to record and interpret the remains of the vast numbers of World War II military installations; coastal batteries; radar sites; airfields, pill boxes etc which natural decay; demolition; coastal erosion and agriculture had destroyed at an alarming rate.
About the time that I was researching the remains of RAF Woodcote 70MU, Russell Webber was researching the St Erth Prisoner of War Camp, 1943. My task was made easier as there were copies of official records in the Public Record Office at Kew, all of which had been declassified and were no longer secret.
Although the Public Record Office held all the official records of all Prisoner of War Camps in the UK, there was none for St Erth. It was if there was never a POW camp in St Erth, and yet we all memories of it and have seen the remains.
And this is where Russell Webber stepped in.The late Russell Webber was a very keen Cornish born local historian from St Erth who researched the history and took many local photographs. He started recording the history of this POW camp and obtained the memories of those who remembered it being built, but his failing health meant that he was never able to finish the project.
Sadly he died in 2017 and his wealth of local history material has yet to be searched but in the meantime I have the honour and privilege to present the results of his research as best that I can as a tribute to his dedication to local history.
This web site contains no 'pop up' adverts or any sophisticated scripts or other up to date web authorising techniques. It consists of entirely boring old but up to date 'HTML5' pages and 'jpeg' images so it will not cause any concern to your anti virus programs or web browser. This website should be user friendly to all up to date web browsers designed for all modern smartphones, tablets, phablets, ipads, laptops and desktop computers.
Please use the 'Contact Me' link to get in contact with me. I am always happy to answer any questions or give advice about anything contained in this web site.
 Contact Me by Email with any questions
Contact Me by Email with any questions
 or Visit me on Facebook
or Visit me on Facebook
 and on YouTube
and on YouTube
